2026年,AI将告别虚拟大脑时代,正式迈入物理化元年。从VLA模型破解莫拉维克悖论,到特斯拉OptimusGen3展现精妙握感,再到智能座舱完成'脊髓进化',AI正在获得改变物理世界的真实力量。本文深度解析这场从'硅片'到'钢铁'的产业革命,揭秘AI如何通过触觉数据、端到端算法和数字孪生技术,实现从'会说'到'会做'的质变飞跃。
如果说2024年是“百模大战”的混乱期,2025年是“应用落地”的试错期,那么2026年则是AI物理化(PhysicalAI)的大成之年。
首先需要理解一个核心差异:“AI普及化”是将AI塞进手机和电脑,而“AI物理化”是将AI注入钢铁与电路,让它拥有改变物理世界的力量。2026,AI正式告别了只会说俏皮话的“虚拟大脑”时代,进化成了拥有“脊髓反射”和“触觉感知”的物理实体。
莫拉维克悖论的黄昏:VLA模型如何让AI拥有“手感”?
长期以来,计算机科学家一直受困于“莫拉维克悖论”:让AI下赢围棋很容易,但让它像一岁小孩一样在乱序的房间里走动却极难。因为逻辑推理是高阶智力,而物理感知是数亿年进化的底层本能。
这一悖论正在被VLA(Vision-Language-Action,视觉-语言-动作)模型暴力破解。
不同于ChatGPT只在文本空间(TokenSpace)游走,VLA模型实现了将语义直接映射为扭矩(Torque)指令。这意味着机器人不再是机械地执行“伸手”指令,而是理解了什么是“握感”。
深度拆解:以TeslaOptimusGen3为代表的具身智能体。在2026年的实测中,它不再需要人类预设路径,而是通过端到端的神经网络,自主识别咖啡杯的材质。如果是陶瓷杯,它会施加稳固的压力;如果是纸杯,它能感知形变并实时调整至5g级的轻柔抓握。
知名案例:就像Figure02在宝马工厂的实战表现:它不再只是搬运工,而是能根据零件的微小位移,自主校准安装角度。这种“分寸感”,标志着AI第一次理解了重力、摩擦力和材料力学。这不再是简单的代码堆砌,而是AI真正“感知”到了物理世界的存在。

智能座舱的“脊髓进化”:端到端算法的物理闭环
2026年的智能驾驶,已经彻底从“感知+规控”的逻辑链路,转向了“感算控一体”的端到端架构。这意味着车不再是靠规则行驶,而是靠“直觉”。
这种进化,本质上是AI物理化在移动空间的最早闭环。
技术演进:三年前,智驾系统遇到障碍物会通过代码判断“Ifobstacle,thenbrake”;而在2026年,以小米SU7Ultra或华为ADS4.0为代表的系统,表现得更像是有肌肉记忆的“赛博生命”。它不再进行显式的逻辑推理,而是通过模仿数亿公里的“老司机数据”,在15ms内做出最优避障动作。
多维度思考:这种“物理化”意味着智能座舱不再是一个移动终端,而是一个具备高阶反射神经的具身智能体。2026年的行业竞争,已经从“谁的屏幕大”转向了“谁的端到端算法更具备博弈温情”。当你尝试切入车流,你的车会通过微妙的蠕动和眼神(车灯交互)与人类司机达成某种默契。这种“非确定性场景下的博弈能力”,才是AI物理化的核心护城河。

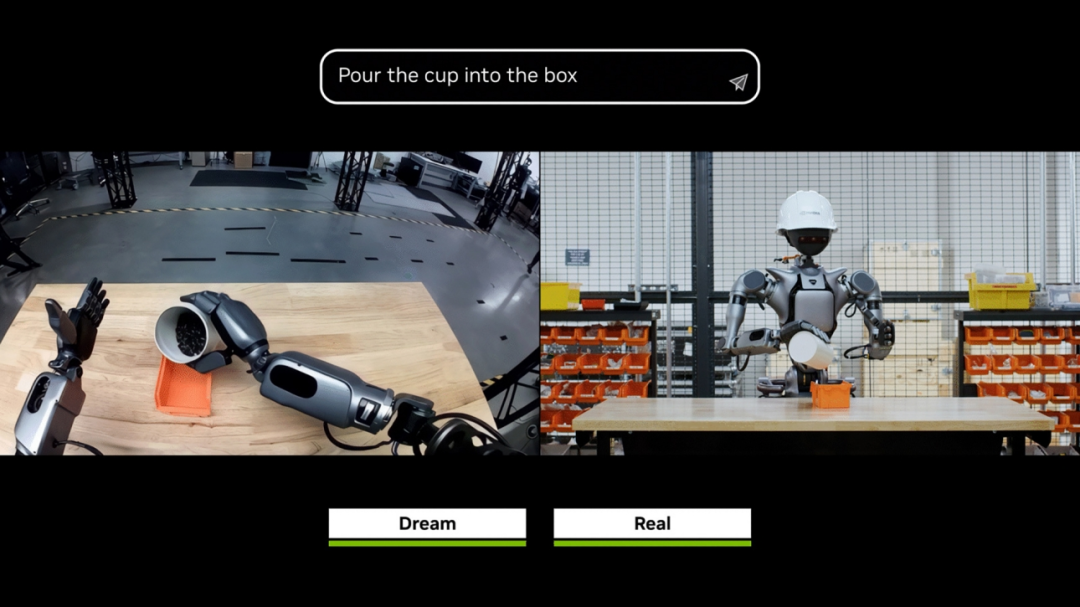
Sim-to-Real2.0:虚拟世界的“一万年”与现实的“一分钟”
为什么AI物理化的速度如此之快?关键在于数字孪生(DigitalTwin)技术从“可视化”向“动力学对齐”的工业化跨越。
2026年,物理世界的反馈,已经可以被99%地通过算力模拟出来。
深度分析:借助NVIDIAIsaacLab仿真平台的成熟,一个机器人可以在虚拟环境里进行“百万次骨折”式的试错。这种ScalingLaw(规模法则)正在物理世界生效:
商业逻辑:当仿真的精度达到99.9%之后,现实世界的采集成本将不再是瓶颈。这意味着一个新机型从图纸到在工厂里拧螺丝,周期从3年缩短到了3个月。2026年,我们看到的机器人不仅是更智能了,而是它们学习物理世界的效率已经超越了碳基生命的极限。
2026产业预判:3点建议
关注“可靠性”而非“参数量”:在物理世界,99%的成功率等于0。2026年的胜负手在于谁能处理那1%的非标极端工况(EdgeCases)。
“触觉数据”是下一块金矿:视觉大模型已经卷到头了,未来属于那些能够精准采集“物理交互反馈”的公司。
座舱与机器人正在合流:你的车不仅是代步工具,它本质上就是一个带轮子的大型人形机器人。舱驾一体的终点,是“全场景物理Agent”。
最后
正月初一,世界正在经历一场从“硅片”到“钢铁”的灵魂灌注。
AI物理化不是一种技术,而是一场效率革命。它让AI第一次拥有了干预现实世界的双手,也让我们第一次意识到:未来,真的触手可及。
2026,我们不聊虚幻,只在物理世界见真章。