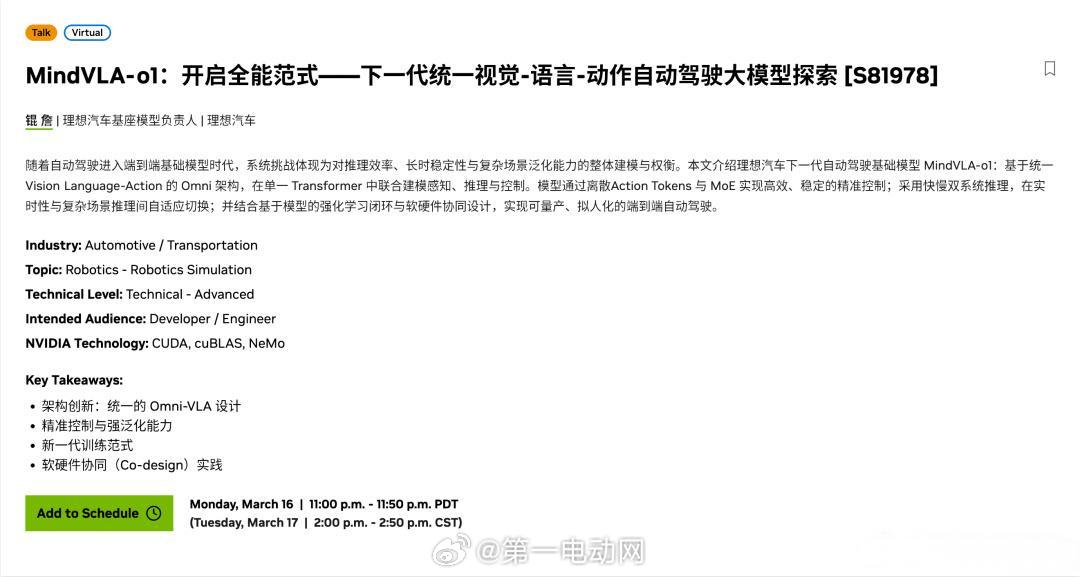
下周二(3月17日),理想汽车将在NVIDIA GTC 2026大会上分享MindVLA-o1——下一代统一视觉-语言-动作自动驾驶大模型。
重点是这几个技术突破:
Omni-VLA架构把感知、推理、控制塞进一个Transformer,告别传统自动驾驶"流水线式"的分模块架构。
快慢双系统 日常驾驶用"快系统"毫秒级反应,复杂场景切换"慢系统"深度推理——这跟人类大脑的运作方式如出一辙。
Action Tokens + MoE 用离散动作token和混合专家模型做精准控制,解决端到端模型"聪明但手抖"的控制精度问题。
软硬件协同设计 算法和硬件一起设计,不是先造大脑再找身体。理想正在做的不只是"更好用的辅助驾驶",而是让AI像人类一样"看懂世界→思考→动手开车"。
这场演讲值得蹲一下
理想汽车MindVLANVIDIAGTC自动驾驶端到端大模型