Tesla和小鹏,都选择汽车相关场景作为第一个机器人落地方向。
自己的场景,产生足够多的目标数据。
在一个单一,具体的场景里面进行落地,再逐渐扩大。
和当年先落地lcc有点像。
而走出第一步,难度比辅助驾驶系统交出去第一个版本,难度大多了。
因为辅助驾驶系统只负责需要软件问题,而第一个落地的机器人软硬件问题需要同时解决。
但是走出第一步之后,就存在了机器人OEM的机会,真实数据闭环才有可能。
必须有足够大的资源投入,也是一个很大的赌注。
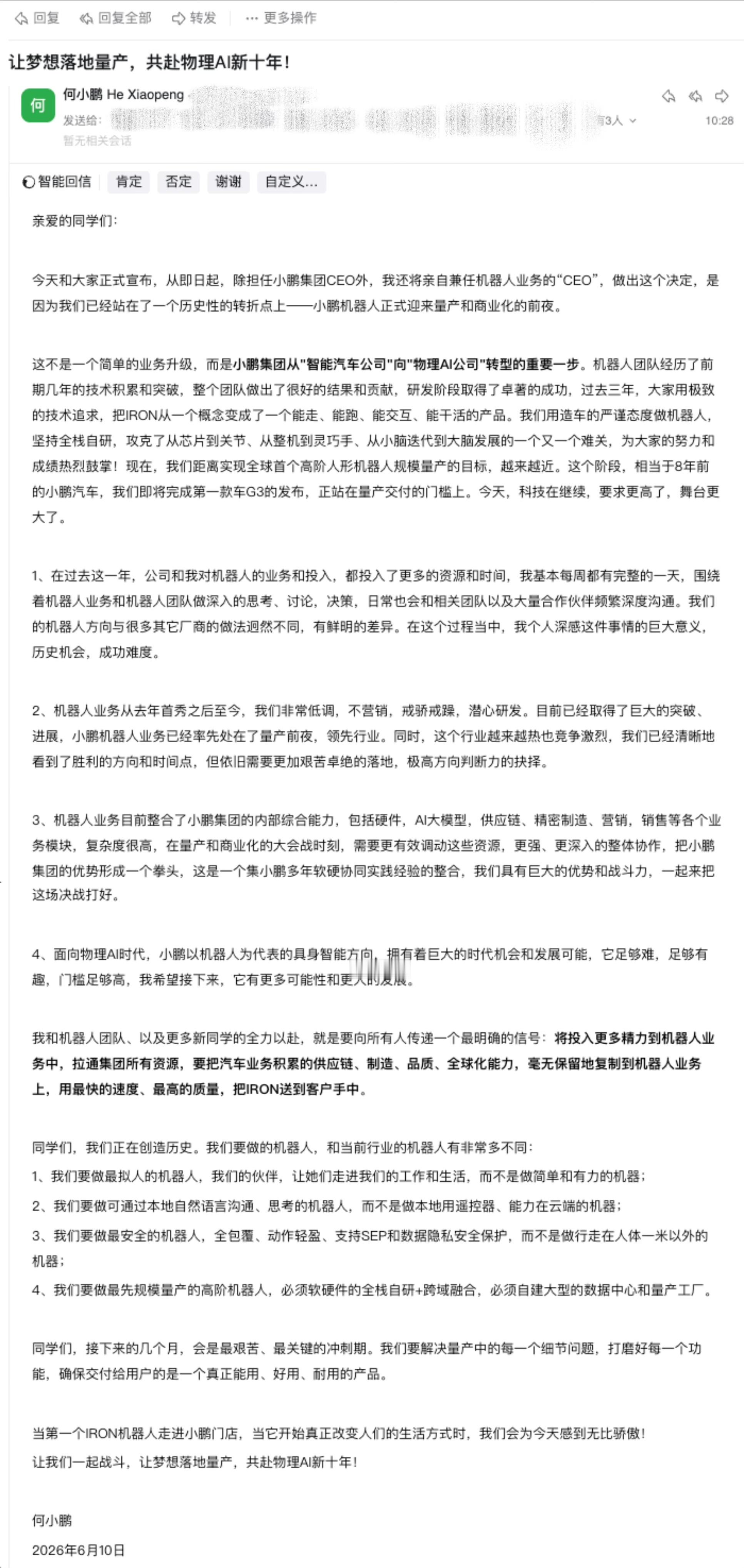
何小鹏带队机器人冲刺量产
Tesla和小鹏,都选择汽车相关场景作为第一个机器人落地方向。
自己的场景,产生足够多的目标数据。
在一个单一,具体的场景里面进行落地,再逐渐扩大。
和当年先落地lcc有点像。
而走出第一步,难度比辅助驾驶系统交出去第一个版本,难度大多了。
因为辅助驾驶系统只负责需要软件问题,而第一个落地的机器人软硬件问题需要同时解决。
但是走出第一步之后,就存在了机器人OEM的机会,真实数据闭环才有可能。
必须有足够大的资源投入,也是一个很大的赌注。
何小鹏带队机器人冲刺量产